
 English
English
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Sth. Africa
Sth. Africa
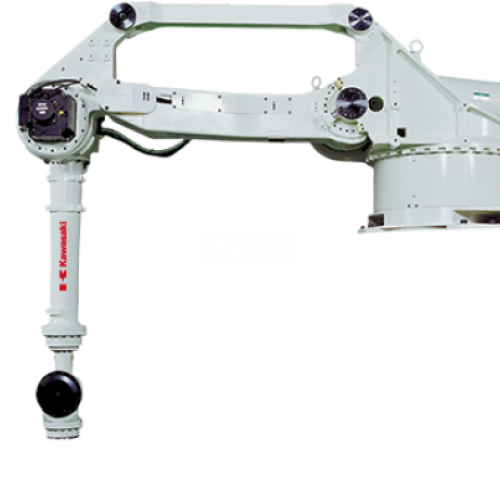
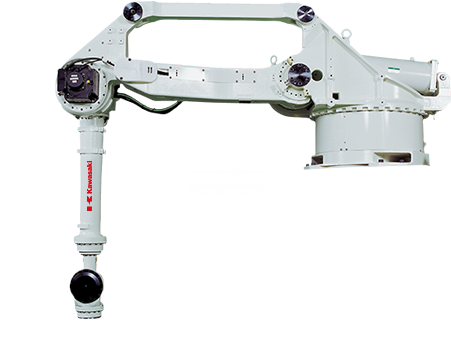
Kawasaki ZTE165U
ZTE165U è un robot flessibile montato a scaffale ideale per il duro lavoro. Questo robot fa parte della serie Kawasaki Z progettata con componenti modulari che consente di aggiornare alcuni modelli di equipaggiamento ottimizzando la gamma, la capacità di carico e la velocità adattandosi facilmente ai cambiamenti e migliorando la produzione; Ha una vasta gamma di movimento è l'ideale per l'applicazione di movimentazione dei materiali e la saldatura a punti, può raggiungere alte velocità di elaborazione.
E Controller
I controller E sono compatti, affidabili e ad alte prestazioni, hanno una tecnologia avanzata nella CPU che consente una maggiore produttività e controllo della traiettoria. Ampia gamma di applicazioni industriali supportate dalla tecnologia Kawasaki AS che utilizza un linguaggio di programmazione che fornisce il controllo della sequenza; possibile espansione di fino a 10 assi esterni per il controllo completo di 16 assi. Manutenzione e diagnosi facili grazie ai suoi componenti modulari e cavi limitati.
- Ideale per la tensione di distribuzione di energia primaria di ogni regione
- Maggiore capacità di espansione
- Struttura chiusa con sistema di raffreddamento indiretto
- Sistema di servo digitale
- Canali I / O 32 (max128)
Numero di assi: 6
Portata orizzontale massima: 3.230 mm
Portata verticale massima: 4.571 mm
Ripetibilità: ± 0,3 mm
Regolatore: E32
Asse JT2: + 60 ° / -75 °
Asse JT3: + 165 ° / -95 °
Asse JT4: ± 360 °
Asse JT5: ± 130 °
Asse JT6: ± 360 °
Asse JT2: 105 ° / s
Asse JT3: 105 ° / s
Asse JT4: 135 ° / s
Asse JT5: 135 ° / s
Asse JT6: 210 ° / s
erogazione
Tendenza della macchina
Manipolazione del materiale
Rimozione del materiale
Saldatura a punti
sigillatura
Attrito Spot Join
Applicazioni
Saldatura a punti , Manipolazione di pezzi , Misurazione , Assemblaggio di parti
{kind=link}