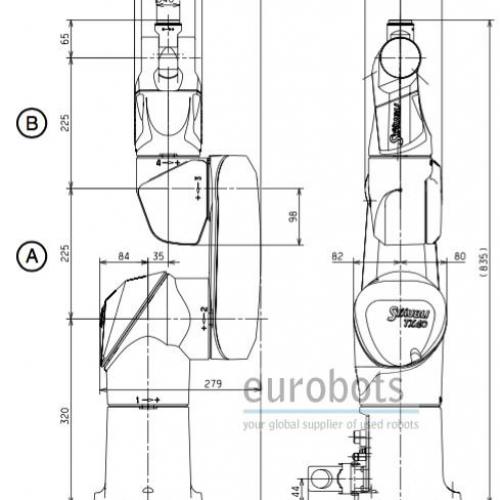
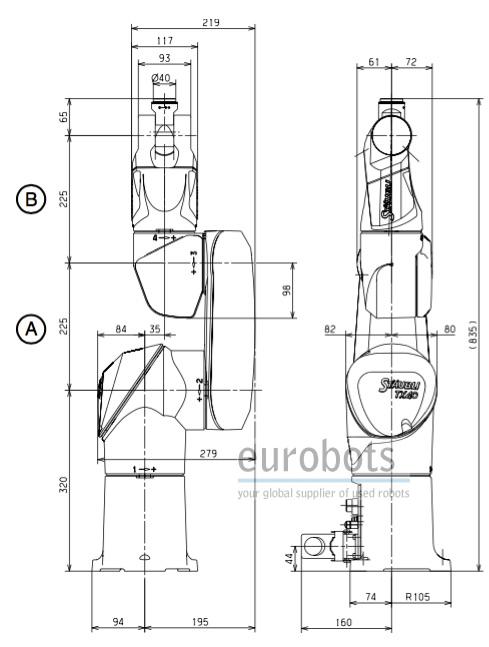
Lo Staubli TX40 è un robot industriale a 6 assi con un carico utile di 1,7 kg al polso ed uno sbraccio ridotto e compatto di 515mm. Si tratta di un robot veloce e preciso utilizzato principalmente nelle aziende di elettronica e farmaceutica dove la precisione e tempi di ciclo molto bassi sono una priorità. Questa unità ha la versione potente e versatile del controller CS8C , l'evoluzione del CS8. Il TX40 è un braccio articolato per una straordinaria destrezza e flessibilità. Ulteriori vantaggi comprendono opzioni di montaggio a pavimento, a parete e/a soffitto per una completa flessibilità nell'integrazione del robot. La robusta struttura completamente chiusa del braccio del robot (nominale IP65) lo rende ideale per applicazioni in ambienti difficili.
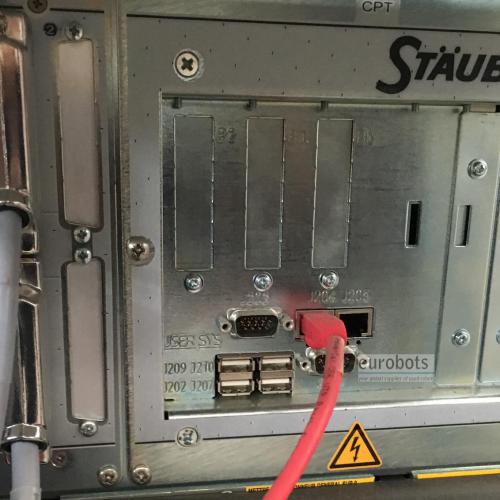
- Ethernet, bus di campo, ingressi / uscite digitali, connessioni seriali
- Architettura aperta
- Facile da installare ovunque
- IP20
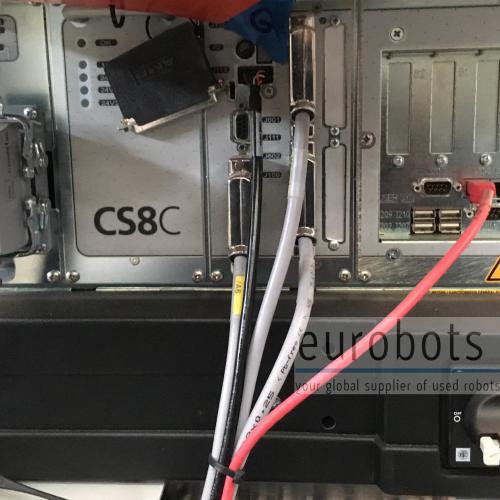
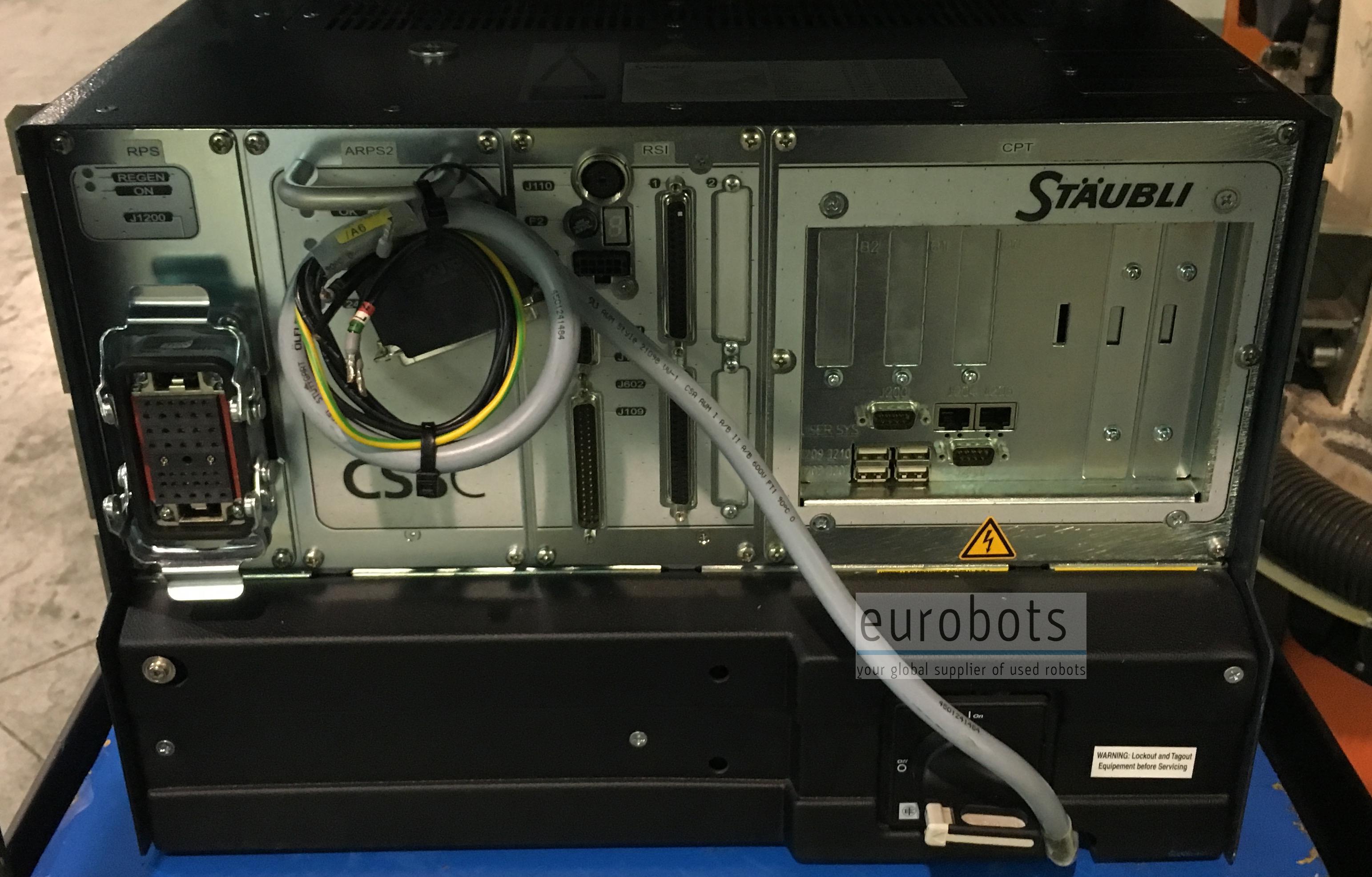
- Versione a rack da 19 pollici
- Compattezza
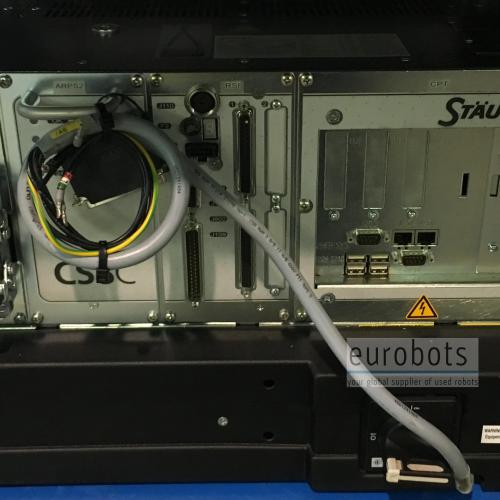
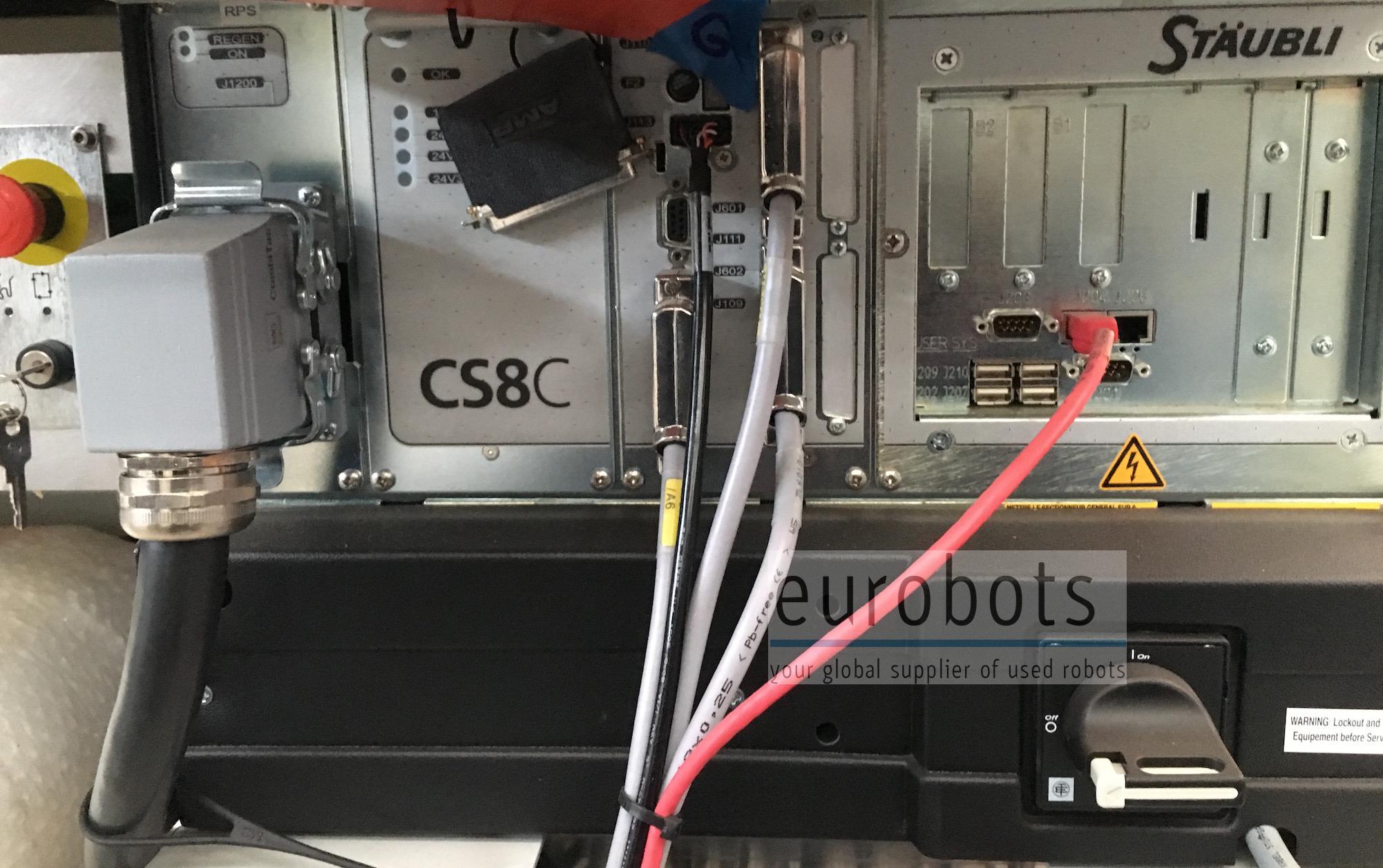
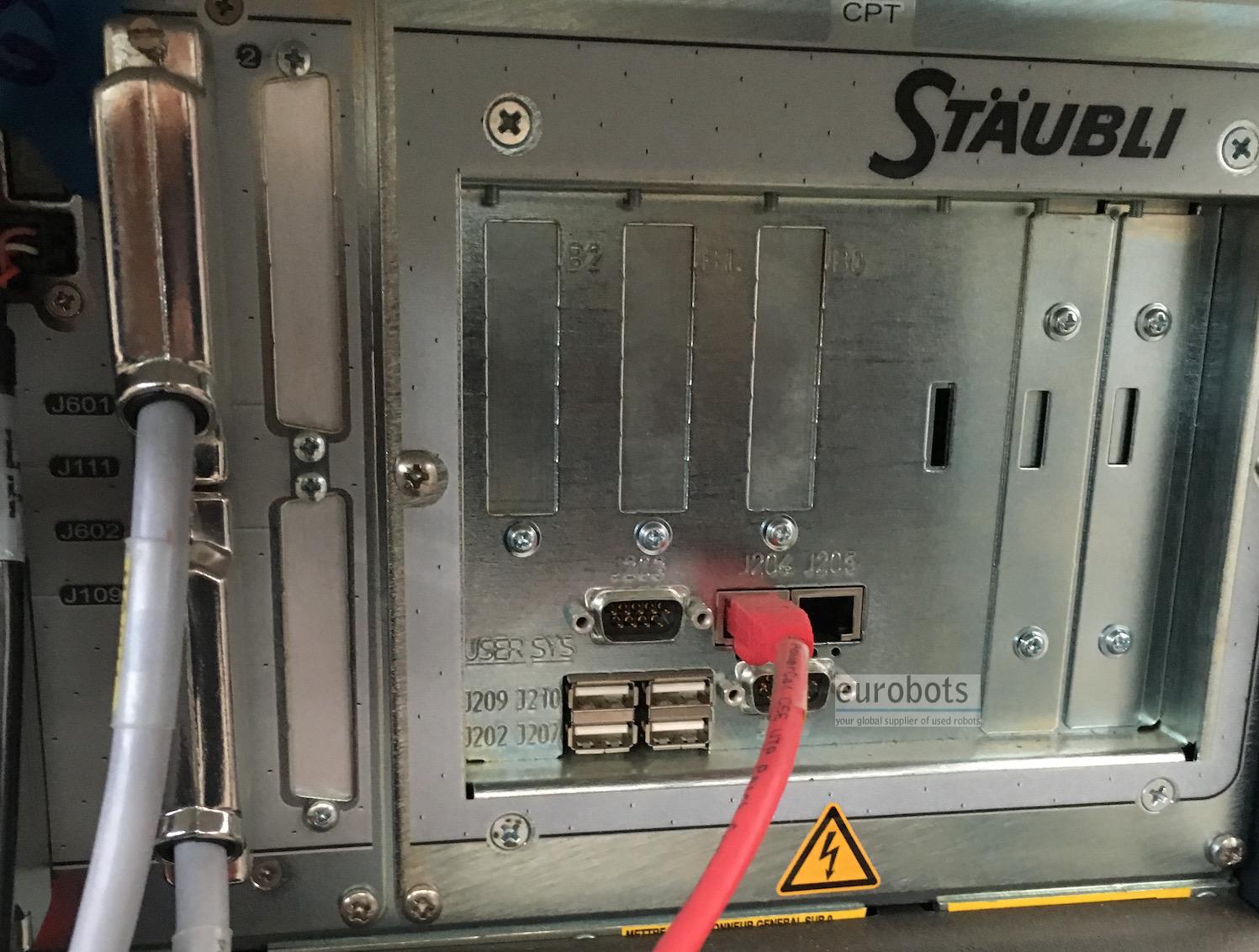
- Tutti i collegamenti sul pannello frontale
- Accessibilità
- Tecnologia digitale 100%
- Affidabilità
- Dimensioni: L x L x P: 331 x 445 x 455 mm
- Classe di protezione: IP20 (opzione IP54)
- Capacità di memoria: 64 MB di RAM (min.)
- Memoria: 64 MB (min.) Flash Disk
- Sistema / linguaggio di programmazione
- VAL 3 (lingua multitask interpretata)
- Linguaggio PLC-IEC 61131-3
- Comunicazione: collegamento seriale RS232 / 422 - server Ethernet Modbus
- Ingressi / Uscite (I / O): 1 o 2 schede 16/16 ingressi / uscite digitali, opzionale
- Bus di campo: DeviceNet, Profibus, CANopen, ModBus
Caratteristiche generali
- Numero di assi: 6
- Massimo carico del robot: 1,7 Kg
- Massima portata: 515 mm
- Ripetibilità: 0,02
- Controller: CS8C
Velocità di movimento del robot
- Asse 1: 555º / s
- Asse 2: 475º / s
- Asse 3: 585º / s
- Asse 4: 1035º / s
- Asse 5: 1135 / s
- Asse 6: 1575º / s
Applicazioni
Carico e scarico dei pezzi , Manipolazione di pezzi , Assemblaggio di parti



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}