O DOBOT Nova2 é um braço robótico versátil e compacto projetado para atender fins comerciais e de varejo.
O Nova2 possui uma capacidade de carga de 2 kg, permitindo-lhe lidar com várias tarefas com precisão. Quer se trate de montagem, pick and place, teste ou outras operações complexas, o Nova2 fornece a força e destreza necessárias.
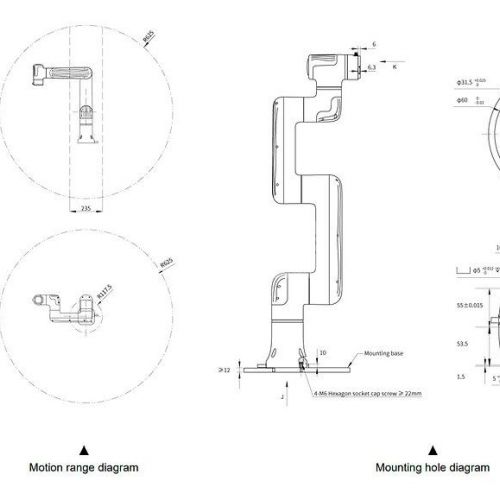
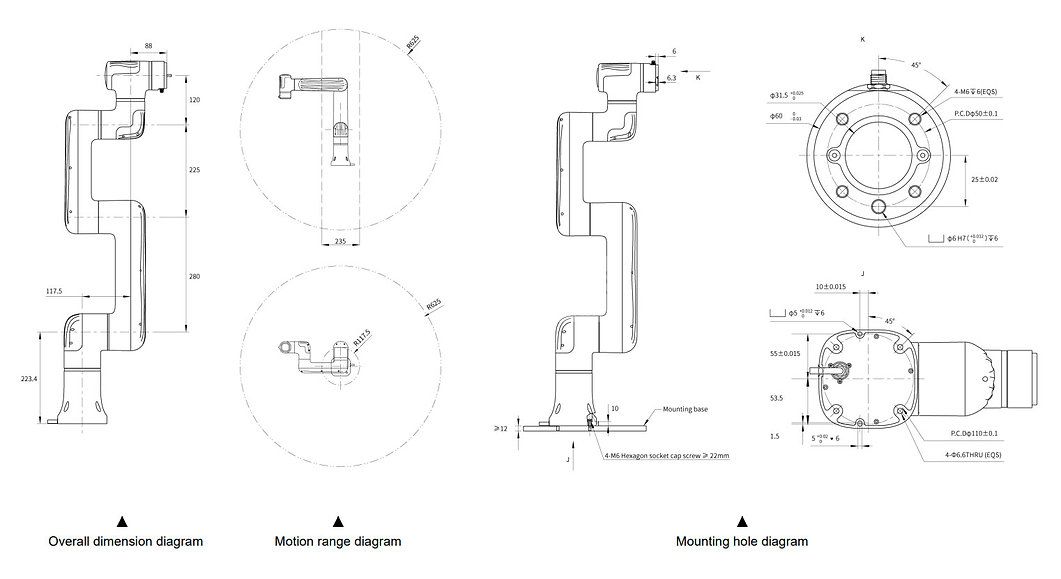
Oferece alcance máximo de 625 mm, proporcionando amplo espaço de trabalho para movimentação de objetos e execução de tarefas.
O Nova2 vem com uma interface amigável que simplifica a programação e o controle. Oferece múltiplas opções de programação, incluindo uma interface gráfica para operação intuitiva e um sistema de programação baseado em blocos semelhante ao Scratch. Isso permite que usuários de todos os níveis de especialização programem e personalizem facilmente as ações do robô de acordo com seus requisitos específicos. Ele oferece várias opções de programação, incluindo a interface gráfica (como scratch), script usando linguagens de programação (LUA) ou API (C, C#, Python, Kotlin...) e a capacidade de ensinar o robô movendo-o manualmente.
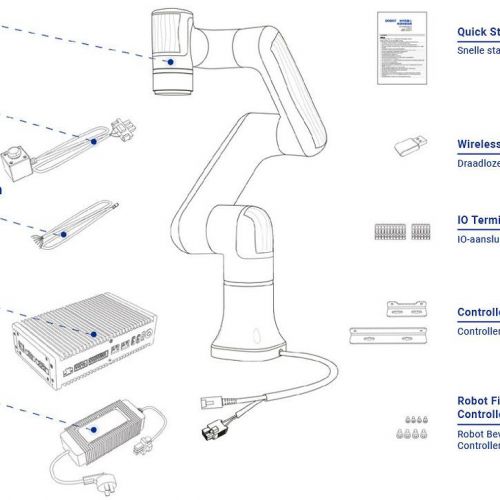
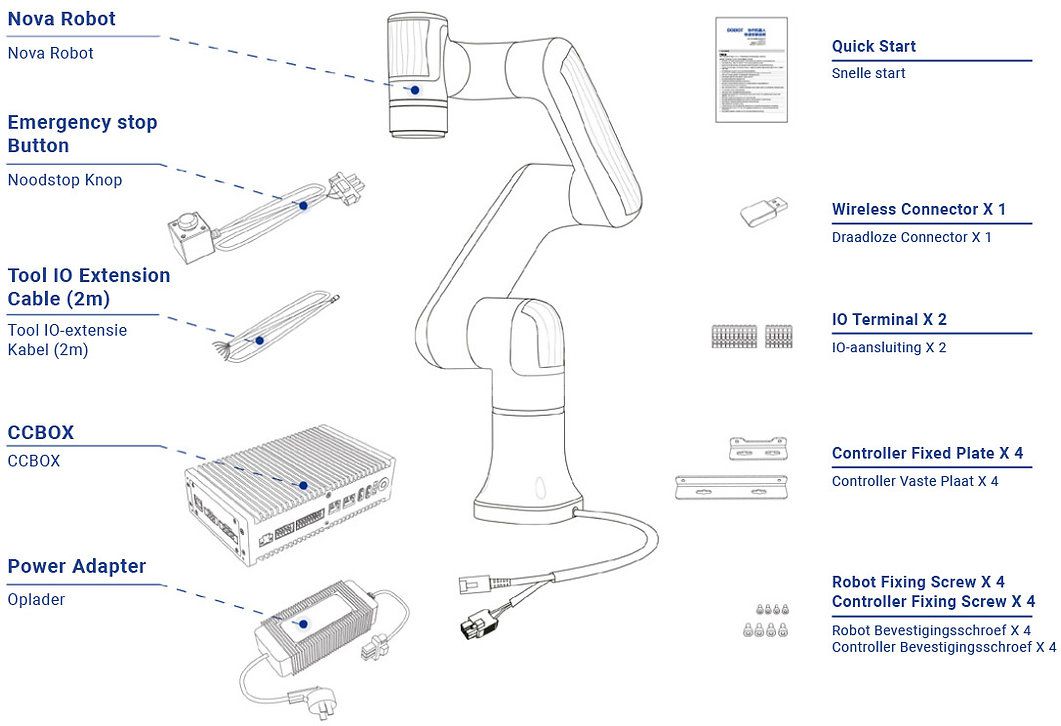
Além disso, o Nova2 é compatível com vários acessórios e periféricos, permitindo maior personalização e expansão de suas capacidades. Ele pode ser perfeitamente integrado a configurações e fluxos de trabalho existentes, aumentando a produtividade e a eficiência.
A segurança é uma prioridade com o Nova2, pois incorpora recursos avançados, como detecção de colisão e recursos de parada de emergência. Essas medidas de segurança garantem um ambiente de trabalho seguro e protegem tanto o robô quanto os operadores.
| Peso | 11 kg (24,3 libras) | |
| Carga Máxima | 2kg (4,4 libras) | |
| raio de trabalho | 625 mm (24,6 pol.) | |
| Velocidade Máxima do TCP | 1,6 m/s (63 pol/s) | |
| Repetibilidade | ±0,05 mm | |
| Amplitude de movimento | J1 | ± 360° |
| J2 | ± 180° | |
| J3 | ± 156° | |
| J4 | ± 360° | |
| J5 | ± 360° | |
| J6 | ± 360° | |
| Velocidade máxima da junta | J1/J2/J3 | 135°/s |
| J4/J5/J6 | 135°/s | |
| Terminar E/S | DI/DO | 2 entradas |
| RS485 | Suportado | |
| Classificação IP | IP54 | |
| Barulho | 65 dB(A) | |
| Faixa de temperatura | 0° a 50° C | |
| Orientação de instalação | Qualquer ângulo | |
| Consumo de energia | Típica | 100W |
| Máximo | 250W | |
| Comprimento do cabo do robô ao controlador | 3 m (118,1 pol.) | |
| Materiais | Liga de alumínio, acrilonitrila butadieno Plástico de estireno | |
| Controlador | |||
| Dimensões | 200 mm x 120 mm x 55 mm (7,9 pol x 4,7 pol x 2,2 pol) | ||
| Peso | 1,3 kg (2,9 libras) | ||
| Potência de entrada | 30~60V CC | ||
| Potência I/O | 24V, Max 2A, Max 0,5A para cada canal | ||
| Interface IO | DI | 8 entradas (NPN ou PNP) | |
| FAZER | 8 entradas (NPN ou PNP) | ||
| IA | 2 entradas, modo de tensão, 0~10V | ||
| AO | 2 saídas, modo de tensão, 0~10V | ||
| Ligar/desligar remotamente | Suportado | ||
| Interface de comunicação | Interface de rede | 2, para comunicação TCP/IP e Modbus TCP | |
| USB | 2, para conectar o módulo sem fio USB | ||
| Interface 485 | 1, para comunicação RS485 e Modbus RTU | ||
| Ambiente | Temperatura | 0° a 50° C | |
| Umidade | ≤95%, sem condensação | ||
| Classificação IP | IP20 | ||
| Modo de resfriamento | Dissipação de calor passiva | ||
| Modo de ensino | PC, APP (Android, iOS) | ||



{kind=link}
{kind=link}
{kind=link}